1.5 Piecewise Jerk Path Optimizer
如下图所示,frenet坐标系下,给定边界,使用优化的思想求解轨迹 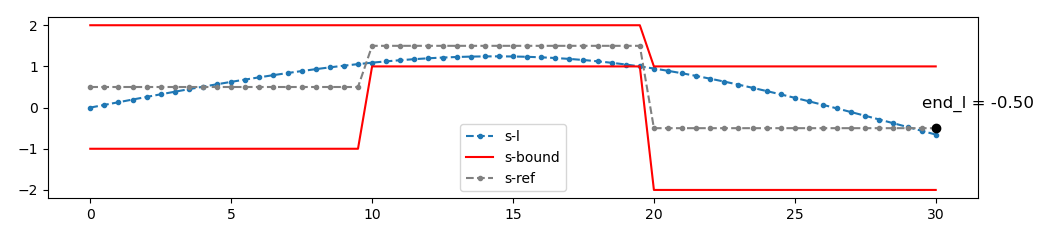
如下图所示,frenet坐标系下,给定边界,使用优化的思想求解轨迹
前面几个decider更偏向于make decision,通过外部环境选择自车的动作 接下来的目标是根据道路、障碍物以及前几步的decision-making建立数学模型来求解轨迹
视频:
Path Lane Borrow Decider
换道时复用上一时刻的轨迹,配置中默认关闭了。 如果有Path Reuse的话,就不需要跑下面的PATH_LANE_BORROW_DECIDER、PATH_BOUND_DECIDER了
Lane Change Decider
配置文件:modules/planning/conf/scenario/lane_follow_config.pb.txt